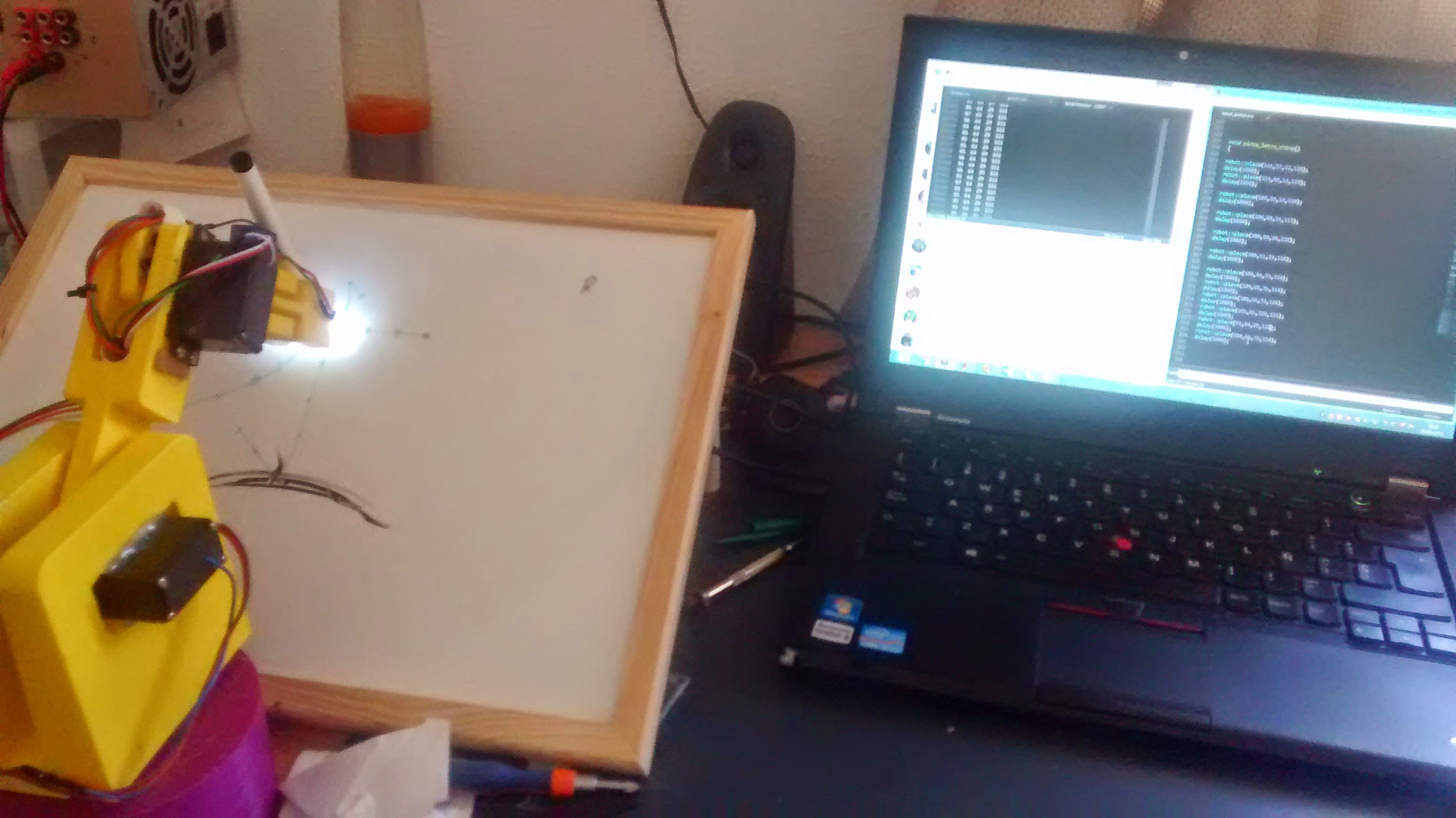
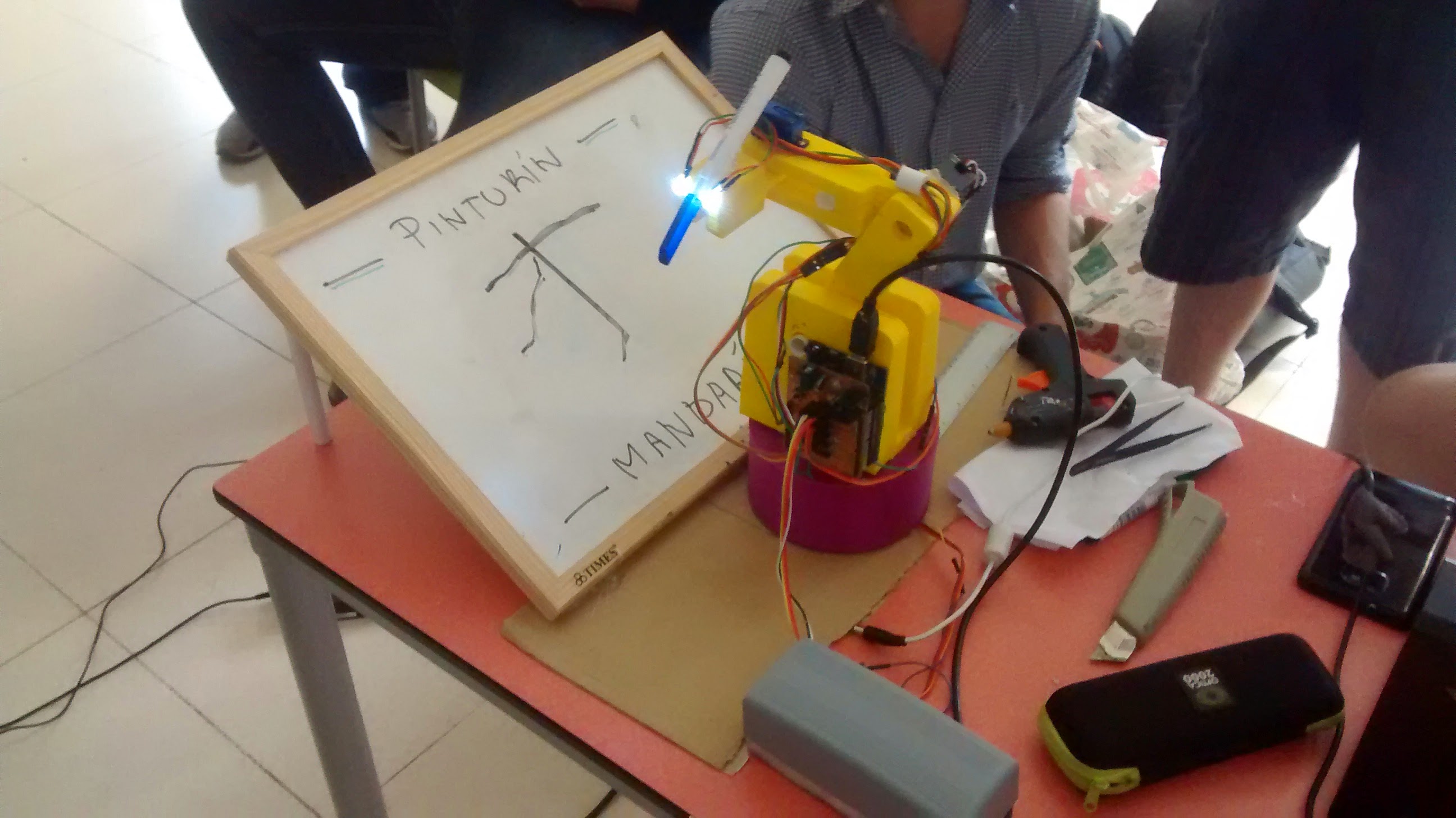
Pinturín Mandarín es el proyecto que hice junto a mis compañeros de universidad(Javier, Miguel y Nuria) que consistía en diseñar y construir un brazo robótico de al menos 2 grados de liberdad, con la capacidad de dibujar un caracter chino en una pizarra.
Tuvimos bastantes problemas con el robot y la mayoría de ellos provocados por falta de tiempo y tener que tomar decisiones precipitadas, servos rotos, piezas que no llegaban a tiempo, lo típico.
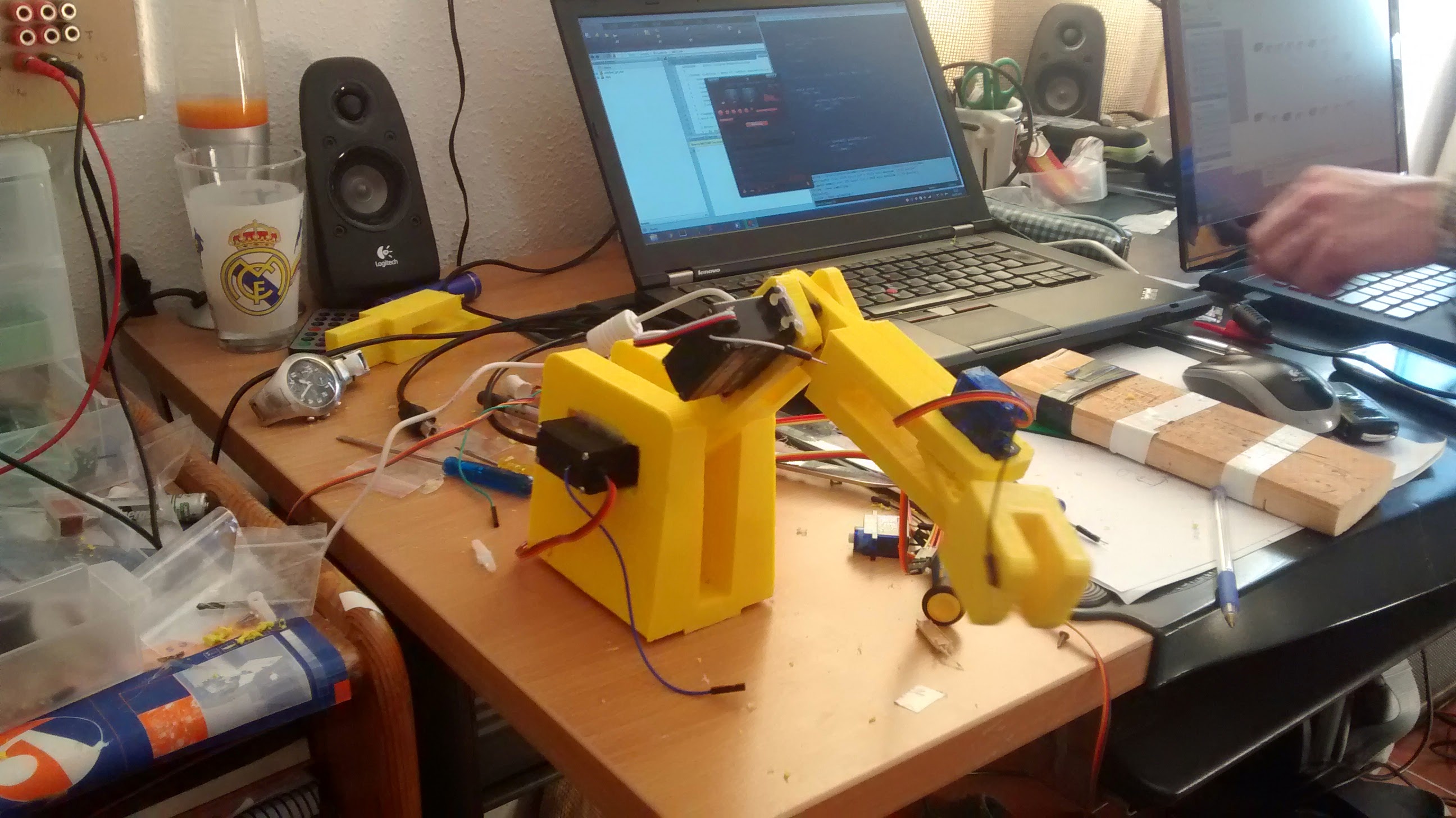
Optamos por un robot del tipo antropomórfico, de 4 grados de liberdad. Más adelante nos dimos cuenta que realmente el último grado de libertad nos sobraba y la muñeca podría haber ido bloqueada. Ésto nos hubiera facilitado los cálculos de las cinemáticas tanto directa como inversa.( una matriz de 4×4 menos que multiplicar, básicamente).

Yo me encargué de la programación, electrónica, cableado y ensamblado, colaborando con mi compañero Javier en programación y planificación de trayectoria asi como las labores de matlab de cálculo de modelos cinemáticos por el método D-H.
Dado que necesitabamos una etapa de potencia, diseñé un shield con un regulador para alimentar los servos a 5V y 2A. Realmente el regulador no era muy eficiente, pues era lineal y no conmutado, por lo que es algo a mejorar para posibles futuras versiones de pinturín.
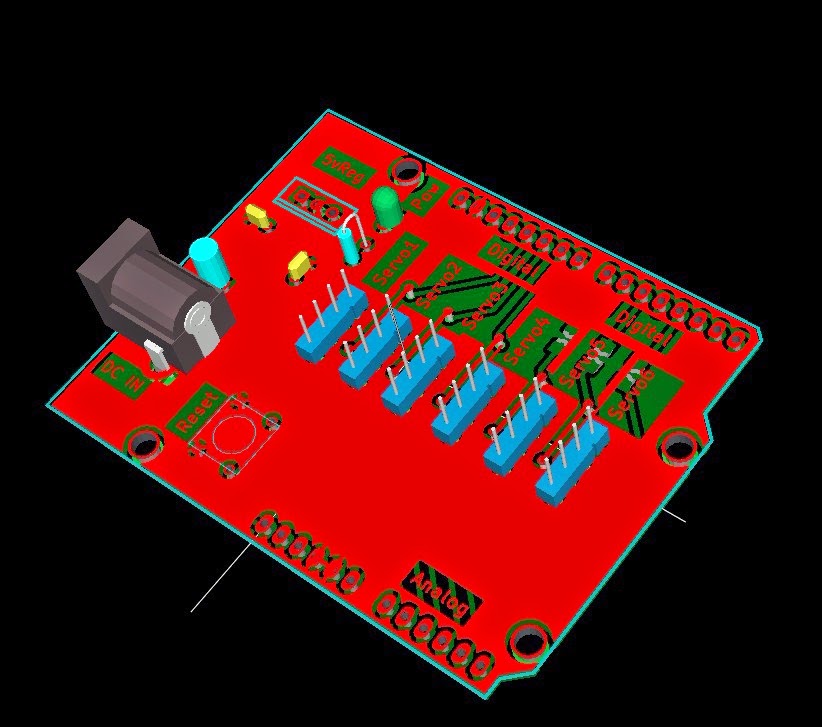
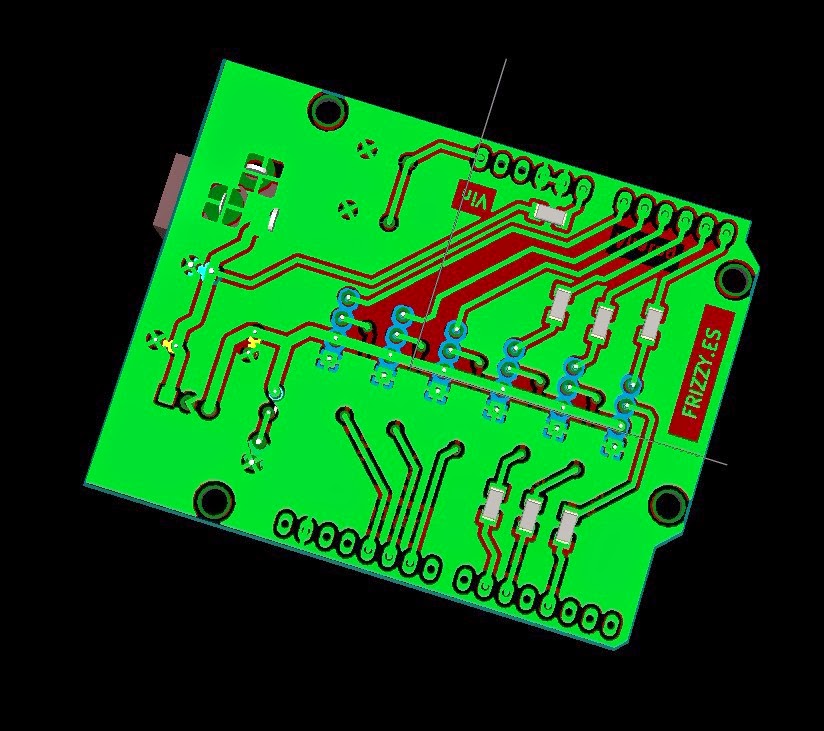
 El shield a su vez dispone de pines para conectar hasta 6 servos pinchados (la manera más fiable de conocer realmente la posición del servo leyendo la tensión del potenciómetro) y alimentación independiente via jack. El shield lo diseñé con la suite de diseño y fabricación de circuitos opensource, KiCAD. Lo fabriqué en la CNC de la escuela.
El shield a su vez dispone de pines para conectar hasta 6 servos pinchados (la manera más fiable de conocer realmente la posición del servo leyendo la tensión del potenciómetro) y alimentación independiente via jack. El shield lo diseñé con la suite de diseño y fabricación de circuitos opensource, KiCAD. Lo fabriqué en la CNC de la escuela.
Para la programación usamos un arduino Uno con C++(POO), aprovechando los conocimientos adquiridos en la asignatura de Informática del mismo cuatrimestre.
Aunque realmente no llegasemos a implementar un regulador PID como tal, ni calcular lugar de las raices, habiendo escogido servos de gran par y reductora, el propio PID interno de los servos realizaba acción P y la interpolación de los distintos puntos de la trayectoria, la D.
Obtuvimos buena nota y me doy por satisfecho con el resultado.
aqui teneis un video del resultado, enlace a instagram